

3·
3 days agoI Feel Good by James Brown was in the trailer for every family comedy made for over a decade.
Linux gamer, retired aviator, profanity enthusiast
I Feel Good by James Brown was in the trailer for every family comedy made for over a decade.

Yeah if 4 people uninstalled the program last time, and 6 people uninstalled it this time, that’s a 150% increase from last time.
I accept your reality and add it to my own.
Pixelfed I think? Though it’s developed by the same guy as whatever the Instagram clone is called so it’s been kind of slow to become usable?
I will assert that, again, for most people, instead of computers remaining at the same TDP but increasing vastly in processing power, they would have been fine with the same processing power at vastly decreased TDP. Look at how long people held onto Win 7, and how long they held onto Win XP before that. Because they were fine, possibly better than the new offering, especially since you already owned it. Some time around 2012, anyone who wasn’t a power user ran out of reasons to get excited for new computers.
Don’t we have that?
That tracks.
I’m 100% okay with how my Samsung Galaxy handles it: You access the Developer mode by pressing on the phone info screen in the settings for several seconds, and then there’s a switch that allows execution of random .apk files.
“Yes, do as I say.”
For most people, computers became powerful enough around the year 2005. A machine from late in the Windows XP era could run 3D games, CAD software, edit video, communicate with the entire world through broadband internet. What abilities have PCs taken on since? So much processing power filled up by doing the same tasks less efficiently for no reason.
This Lemmy comment will be performed in the voice of that fat British guy on Youtube shorts that talks about marketing
You see, the problem with marketing it as a “second phone” is that you’re implying that it’s too shit to be someone’s first phone. Or that you’ve chosen to do something to it that would make it impossible to live with.
I remember in 2018, Verizon started offering a tiny little Android phone branded as a Palm of all things, and that small but vocal minority who insist they want small phones started clamoring for it only to be told that it’s a “companion device” and you still had to have another device active on that line. It cost $350 plus $10 a month on top of another device and plan.
There was essentially no one on earth who wanted a special phone they only used to take to the gym with them, they refused to sell it to people who specifically wanted it, and so it didn’t sell well, to say the least.

It is my understanding that iOS does not support Syncthing.

I built a MK4S from the kit, and I would recognize it, even without having printed it it’s a memorable part of the build. You’d basically have to have built or upgraded a Prusa printer in the last 2 years to recognize it for what it is. If you hadn’t been introduced to it, do you have any hope of guessing what that’s for?
I’m sure this has absolutely nothing to do with ghost guns. “Ghost guns” is just another way of spelling “protect the children.”
When was the last school shooting that used a ghost gun? No, they use Bushmasters, Rugers, Smith & Wessens, Glocks. Because you can just…buy those. In a store. When’s the last time a serial number stopped a shooting?
There’s definitely a little bit of this going on.
I wonder if Nvidia is leaning on them a bit. Like, create a regulatory requirement for something for one of their bullshit datacenters to do now that Microslop has said “we need to find something useful for AI to do or we’re not going to be able to live the lie much longer” out loud almost verbatim?
I outright don’t know if this is even possible. I mean…

What’s that? I bet 60% of people who have touched one of those couldn’t identify what it is by sight. Should I be allowed to print that?
I’ll take your filthy upvote. Not from a big truck, through a series of tubes.
Yep. The way that is accomplished is that practically all governments that issue paper money add a specific pattern of five circles to it somewhere, often in numerous places. American 10, 20, 50 and 100 bills use repeating patterns of those numbers to disguise it, others hide or celebrate it in various ways. Any scanner, copier or printer is looking for that pattern, and if it sees it, it refuses to print it.
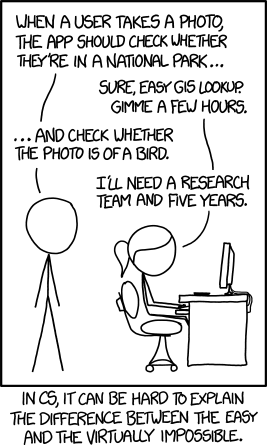
The problem to solve there is “is this 2D pattern present?” It’s like asking if the word “soup” is printed somewhere on a page in Courier New, in terms of the computational power it takes to solve; it’s just optical character recognition.
Prusa is evidently stupid enough to bake a bitmap image of the object to be printed in their G-Code file, but that could be stopped. The printer doesn’t get to see the model file, only the hundreds of thousands of lines of G-Code that it is expected to obey as perfectly as it can.
There are still printers for sale today that run on Arduino Mega-based control boards; you want them to try answering “is this G-Code going to make a part of a gun” as a function of the firmware? Psh.
I bet HP would try to have you jailed for it if you threaten their ink racket.
When was the last time a legislator understood the legislation they were passing?
I’d rather have T9 than swiping. T9 actually worked.



{kind=link}
{kind=link}
I recommend Paul Fellows, who has a large catalog of brief astronomy lectures under his “Once Around” series.