
A Reddit Refugee. Zero ragrets.
Engineer, permanent pirate, lover of all things mechanical and on wheels
moved here from lemmy.one because there are no active admins on that instance.
- 19 Posts
- 275 Comments

 6·2 days ago
6·2 days agoItaly is fairly rightwing and has been drifting more right over time. Don’t underestimate their ability to not let a crisis go to waste!
I’m sure they’ll be introducing legislation that makes owning your own means of production onerous if not illegal within a week or two. Can’t be having citizens realize they can make their own replacement parts or consumer items!
 23·3 days ago
23·3 days agoJust get AMD gpu’s, they work perfectly fine and have less driver issues than Nvidia cards do now.
 15·5 days ago
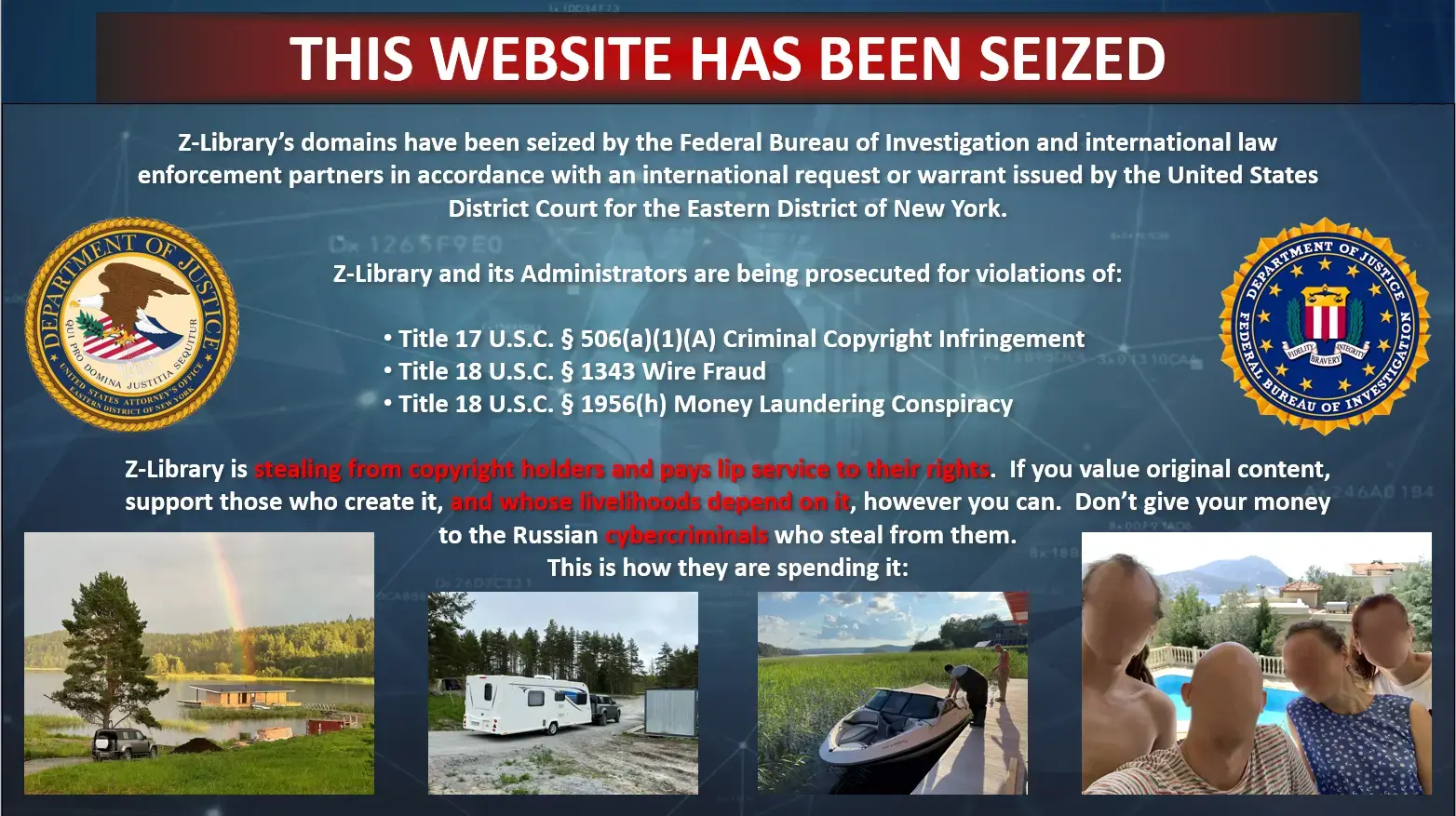
15·5 days agoCorrect answer. Individual “streaming” sites come and go like the wind, you can’t rely on any of them to stick around for more than a few months. But P2P torrents are resilient and almost always available.
 12·5 days ago
12·5 days agoYes. Intel now splits their CPU’s with “P” cores (performance) that function like normal x86 processors with hyperthreading, and “E” cores (efficiency) that are lower clocked, less feature rich cores without HT.
Most OS and background tasks can be loaded on E cores while P cores work strictly on high performance programs. Its not bad, except for the fact that its Intel building them.
 136·6 days ago
136·6 days agoThey do have a copy of your Bitlocker key if you are dumb enough to allow it to sync with your Microsoft account, you know, “for convenience.”
Which I don’t believe is the only way it can leak. It’s well known Microsoft can access anything and everything on an internet connected Windows PC whether there’s a Microsoft account or not. If the nazi’s push for the device of someone on a local account only, you know they’ll magically find a way.
So, this means Microsoft has copies of every single bitlocker key, meaning that a bad actor could obtain them… Thereby making bitlocker less than worthless, it’s an active threat.
MS really speedrunning worst possible software timeline
All digital devices will use some amount of memory. Audio devices are all digital these days and only use a DAC (Digital to Analog Converter) to generate the actual audio waveform from a raw sample stream.
On something like a standalone audio amp there still has to be the whole backend to store codec information, menus and settings, and a whole host of other controls and audio processing features that are likely implemented on top of a basic OS and not directly written to a microcontroller. There’s more memory than you think.
HAM will work best for long distance communication but does not have enough capacity to support local short messaging for any major population sizes. Mesh networks scale in bandwidth and will not be overwhelmed as easily if tens of thousands of people suddenly hop on it at the same time.
As much as private equity wants to think it is, housing is not a commodity like DRAM is.
Housing always has a base value in that people always need places to live, so it’s price is sticky. The need for DRAM could disappear overnight if it so happened that way.
Don’t bring your phone period. Any and all devices can be broken into by law enforcement. Buy a burner with cash if you need some kind of communication.
I’d avoid LG, their monitor controls suck ass (three button clicks to turn it on and off is unnecessary, power buttons should be a one and done) and I’ve lost track of how many LG monitors and TV’s I’ve found with complete backlight failure, turning the whole panel blue.
 18·22 days ago
18·22 days agoFascists now hold power and they don’t want people putting up resistance. Textbook exactly what Nazi germany did.
 1·22 days ago
1·22 days agoNeat! I see why people prefer flatpaks these days with keeping each install sandboxed.
The uid 0 part I think is why it shows SU, based on IanTwenty’s comment. Apparently a longstanding bug in MATE.
Yes I installed it from Flathub. IanTwenty’s comment says it is a longstanding bug with the MATE environment I am using, where flatpak’s running as a sandboxes process user ID show up as SU in the title bar when they actually aren’t.
Ah okay. And makes sense seeing as it does not ask for escalation at launch. I probably won’t worry about it then. Thanks!!
- verify actual bed and print nozzle temp using IR or contact probe. Thermistors can die and cause too low a temp.
- fully wash bed with soap and water, not just IPA.
- try a different spool or brand of filament. Sometimes whole spools are just formulated badly and it won’t ever adhere right. I’ve tossed a few spools that wouldn’t ever print correctly no matter the settings.
I will take a guess that you won’t have any image lag issues whatsoever.
Pretty much all displays have imperceptible lag on actually displaying an image- a lot of consumer flat screen TV’s are terrible at it because of their controller being shite or intentionally lagging the image to do frame interpolation or some other kind of background processing. Older analog screens don’t do any of that, they get signal, display signal.

yeah most all of them are good to -30c easy, as with most electronics, just make sure it stays dry and let it sit inside to acclimate for a few hours before you turn it on.
when very cold rubber and wire insulation might crack if moved, but sitting stationary it’s fine.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
lol :(